

中心议题: 汽车尾灯和刹车控制器设计分析解决方案: 利用PWM信号发生器 采用AD8240的开关驱动器
现在,尾灯已广泛使用红色LED。虽然成本依旧是个问题,不过安全、环保和款式灵活多样等因素都倾向于采用LED。最受欢迎的应用之一是中央刹车灯。本设计构想展示了尾灯和刹车灯使用同一LED阵列的方法。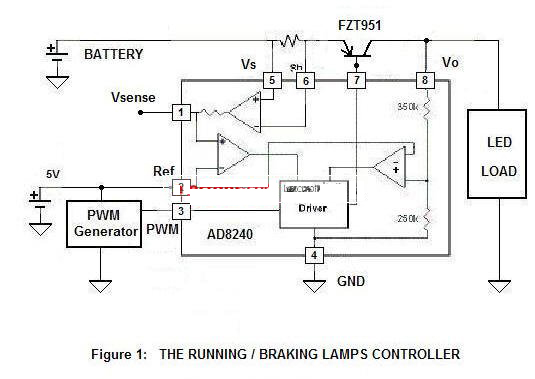
图1:行驶/刹车灯控制器
LED(发光二极管)亮度 一般用发光强度(Luminous Intensity)表示,单位是坎德拉cd;1000ucd(微坎德拉)=1 mcd(毫坎德 拉), 1000mcd=1 cd。室内用单只LED的光强一般为500ucd-50 mcd,而户外用单只LED的光强一般应为100 mcd-1000 mcd,甚至1000 mcd以上。
图2显示该PWM发生器,它由两个555定时器组成。PWM信号控制LED亮度。当PWM输入为高电平时,VO开启;当PWM输入为低电平时,VO关闭。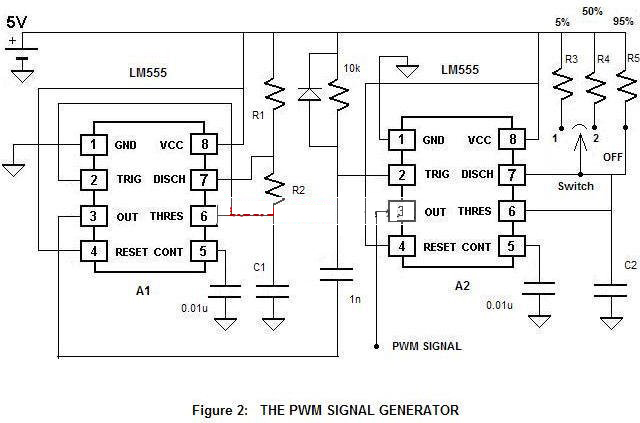
图2:PWM信号发生器
上一页12下一页
00

- 电话:+86-0755-2950 0800
- 传真:+86-0755-2973 8675
- 微信:联系客服
- QQ:800009589
- Email:hfquan@pinnace.cn
推荐产品
汽车尾灯和刹车控制器设计分析
高压应用与低功耗控制器的接口连接
中心议题: 低功耗控制器与高 DC 电压接口连接解决方案解决方案: 数字输入串行器的工作原理 数字输入串行器输入信号的配置情况
许多商业和工业应用都面临一个难题,即如何通过接口将低压微控制器及数字信号处理器 (DSP) 连接至高压传感器开关和其他数字、高压电路。大多数情况下,需要通过这些接口获取二进制(1/0,或者高/低)状态信息形式的反馈。新一代的接口器件,被称作数字输入串行器 (DIS),其在连接低功耗微控制器的同时能够以最高能效方式对数字输入电压进行检测,检测范围最低可达 6Vdc,最高可达300 Vdc。
本文将介绍数字输入串行器的工作原理及其低、中、高压输入信号的配置情况。
工作原理
为了更好地理解 DIS 的工作原理,我们以完整的接口设计为背景来对这种器件进行研究(请参见图 1)。一般而言,高压总线为一组传感器开关即 S0 – S7 供电,其开/关状态由器件的八个现场输入即 IP0 – IP7 来检测。内部信号处理将输入信号转换为低伏电平,并将其应用于并行输入、串行输出移位寄存器的输入。由于微控制器的负载脉冲作用于 /LD 输入,因此内部输入数据被锁闭到移位寄存器中。微控制器向 CLK 输入施加一个时钟信号,根据该信号以串行方式将数据从 DIS 中移位,然后通过数字隔离器进入一个控制器寄存器,这样便完成了移位寄存器内容的读取。
高压接口要求使用数字隔离器,目的是将剧烈变化的远距离传感器开关接地电位,同控制器电子器件的局部接地电隔离。
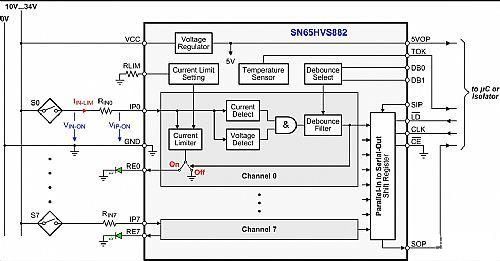
图 1 数字输入串行器的典型结构
适用于高伏接口的一些传感器开关包括接近开关、继电器触点、限位开关、按钮开关等等。就高输入电压而言,输入电阻器 RIN0 到 RIN7 的实施对于将输入开关阈值升至更高电平来说是必要的,而低输入电压的系统一般无需输入电阻器。
图 1 表明高达 34V 的电源电压可以直接作用于电源接线端和八个输入端,无需保护电阻器。在使用这种电源电压的情况下,内部线性稳压器可以提供稳定的 5V 输出,以为器件内部电路和外部隔离器或者微控制器供电。另一个辅助功能是片上温度传感器,其在结温达到 150oC 时便向控制器发出报警。
通过可调节输入电流限制,让在器件输入端直接使用高达 34V 的高压成为可能。就纯电阻输入的高压接口而言,由于输入电流增加带来输入电压上升,从而导致其功耗急剧上升。与之相比,由于将输入电流限制在某个恒定电平,而这一电平可以通过使用一个外部精密电阻器来进行调节,因此 DIS 的输入极大地降低了功耗。
另外,每条通道都对其输入信号进行强度和耐力检查。这种电流、电压检测功能具有一些内部信号阈值,用于确保通道不会被漏电流或者残留电压触发。
在导通状态(开关关闭)的情况下,电流比较器检测输入电流是否高于预定义的漏电流阈值,而电压比较器则检测输入电压是否高于内部设定的基准电压。如果两个比较器输出均为逻辑高电平,则可编程去抖动滤波器检查输入状态的新变化是否由噪声瞬态或者真输入信号所引起。
导通状态时,滤波器输出为高电平,同时电流限制器输出连接至信号返回输出(Rex)。每个 RE-输出均有一个发光二极管 (LED) 连接接地层,从而实现传感器开关状态的可视化指示。因此,如果某个开关关闭,则 LED 亮起。在断开状态(开关打开)下,滤波器输出为低电平,同时电流限制器的输出接地,则 LED 不亮。
输入配置
针对某种应用对数字输入串行器进行配置时,只有两个重要的参数,即输入电流限制 IIN-LIM 和导通阈值 VIN-ON。这两个参数均通过外部电阻器 RLIM以及 RIN0 到RIN7 来进行调节。尽管 RLIM 定义所有八条输入通道的电流限制,但也可以通过使用不同的 RIN 值,来单独设定每条通道的导通阈值。
电流限制器内部实现比较器功能,其阈值电流 ITH 与最大输入电流 IIN-LIM 完全相同。利用一个反射系数为 n = 72 的电流镜,通过基准电流 IREF 推导出 ITH。由于 IIN-LIM 与 ITH 相同,因此最大输入电流可以表示为:
方程式 1
IREF 反过来又由内部 1.25V 带隙基准与外部电阻器 RLIM 的比计算得到:
方程式 2
将方程式 2 插入到方程式 1 中,得到 IIN-LIM 为 RLIM 的函数:
方程式 3
求解方程式 3 得到 RLIM,即设置理想电流限制所需的电阻器值:
方程式 4
上一页12下一页
00现场输入导通阈值电压 VIN-ON,与电流限制、输入电阻器以及器件输入的导通阈值电压 VIP-ON 有关。VIP-ON 等于内部电压检测比较器的固定 5.2V 基准电压。因此,VIP-ON 可以表示为:
方程式 5
插入 VIP-ON 的数值,然后代入方程式 3 的 IIN-LIM 计算结果,得到:
方程式 6
然后求解 RIN,得到设置规定电流限制条件下理想导通阈值所要求的输入电阻器值:
方程式 7
因此,针对各种应用对 DIS 进行完全配置只需要两个方程式,即方程式 3 用于设置电流限制,而方程式 7 用于达到理想导通阈值电压。根据这两个方程式,表 1 列出了不同输入阈值电压和电流限制的各种电阻器组合情况。
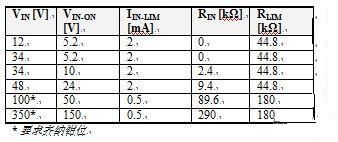
表 1 各种输入配置
表 1 中的星号表示非常高的输入电压会超出最大器件电压 34V。这种情况下,IPx 和接地之间连接的 30V 齐纳二极管可防止器件输入毁坏。将开关阈值设定在输入电压范围的中间,即 VIN-ON = VIN-max/2,这时最大齐纳电流将等于输入电流限制,即 IZ-max = IIN-LIM,同时总输入电流将为电流限制的两倍。
若想节能,需将电流限制设定为 0.5mA。很明显,在这种低输入电流情况下,将指示器 LED 连接至 Rex 输出没有意义,因为其不会亮起。相反,我们应该将它们放置在 CMOS 输出可以很容易地实现 LED 驱动功能的控制器端。
串行接口
图 1 表明对于高达 24V 标称值、或者 34V 最大值的总线电源来说,数字输入串行器可以将总线电压调低到 5V,以为数字隔离器或者微控制器提供充足的电源。但是,在高压条件下,在DIS之前调低总线电源电压,会极大地降低总功效。在非隔离应用中,使用一个微型充电泵,并通过控制器电源为 DIS 提供备用电源,这样做更利于提高能效。但是,在隔离式应用中,要求一个隔离式 DC-DC 转换器来穿过隔离层提供控制器电源。
实施电气隔离的原因是,数字输入串行器一般用于检测远距离安装传感器和信号源的输出电压,例如:AC 整流器的输出,其接地电位明显不同于本地控制器接地。将各种接地电位相互连接会引起大量接地环路电流流动。使用数字隔离器可以防止出现这种情况。
如前所述,DIS 数字接口的控制很容易实施。系统控制器只需通过其通用输出端之一,向 DIS 的/LD 输入端发送一个短且低活跃度的负载脉冲,旨在将当前的现场输入状态锁存至 DIS 移位寄存器中。之后,它向 CLK 线路施加一个时钟信号,以串行方式移出寄存器内容。
如图 2 所示,DIS 的移位寄存器结构通过简单地将前面器件的串行输出 SOP 连接至后面器件的串行输入 SIP,实现以菊花链方式连接多个器件。这种方法允许进行高通道数目的紧凑型数字输入模块设计,同时其仅使用了一个串行接口。
一次读取多个 DIS 器件的内容时,较短的读取周期时间便为基本要求,而标准微控制器 SPI 接口的最大速度已经可以达到 10 MHz 或者 20 Mbps。但是,DIS 的串行接口可以支持高达 300 Mbps的数据速率,其甚至超出了一些高速隔离器的数据速率。因此,若想将读取周期时间缩短至绝对最小值,便要求极高的时钟频率,同时还必须消除隔离器的传播延迟。
正因如此,微控制器常常被现场可编程门阵列 (FPGA) 所取代,因为它不仅仅具有高时钟频率,而且还允许实现接收时钟输入(如图 2 蓝色线条所示)。然后,由 FPGA 发送的相同时钟信号,经过隔离器延迟,开始将寄存器内容移出 DIS,同时与 SOP 信号一起通过另一个隔离器通道获得反馈,从而保持接收时钟和数据之间的相位关系。
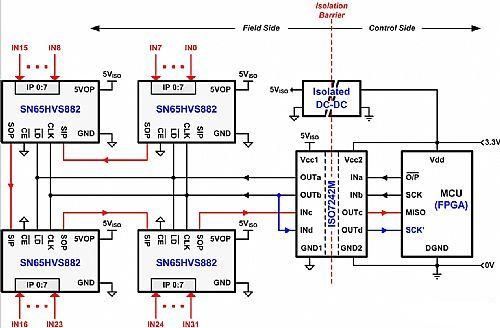
图 2 隔离 32-通道数字输入模块
结论
数字输入串行器是低功耗控制器与高 DC 电压接口连接的最通用解决方案。SN65HVS88x 系列数字输入串行器支持低压控制器和高压应用之间的接口设计,拥有各种各样的特性,例如:欠压检测、电流限制、去抖动滤波、散热保护、奇偶发生以及单 5V 电源等。
上一页12下一页
00
中心议题: 低功耗控制器与高 DC 电压接口连接解决方案解决方案: 数字输入串行器的工作原理 数字输入串行器输入信号的配置情况
许多商业和工业应用都面临一个难题,即如何通过接口将低压微控制器及数字信号处理器 (DSP) 连接至高压传感器开关和其他数字、高压电路。大多数情况下,需要通过这些接口获取二进制(1/0,或者高/低)状态信息形式的反馈。新一代的接口器件,被称作数字输入串行器 (DIS),其在连接低功耗微控制器的同时能够以最高能效方式对数字输入电压进行检测,检测范围最低可达 6Vdc,最高可达300 Vdc。
本文将介绍数字输入串行器的工作原理及其低、中、高压输入信号的配置情况。
工作原理
为了更好地理解 DIS 的工作原理,我们以完整的接口设计为背景来对这种器件进行研究(请参见图 1)。一般而言,高压总线为一组传感器开关即 S0 – S7 供电,其开/关状态由器件的八个现场输入即 IP0 – IP7 来检测。内部信号处理将输入信号转换为低伏电平,并将其应用于并行输入、串行输出移位寄存器的输入。由于微控制器的负载脉冲作用于 /LD 输入,因此内部输入数据被锁闭到移位寄存器中。微控制器向 CLK 输入施加一个时钟信号,根据该信号以串行方式将数据从 DIS 中移位,然后通过数字隔离器进入一个控制器寄存器,这样便完成了移位寄存器内容的读取。
高压接口要求使用数字隔离器,目的是将剧烈变化的远距离传感器开关接地电位,同控制器电子器件的局部接地电隔离。
图 1 数字输入串行器的典型结构
适用于高伏接口的一些传感器开关包括接近开关、继电器触点、限位开关、按钮开关等等。就高输入电压而言,输入电阻器 RIN0 到 RIN7 的实施对于将输入开关阈值升至更高电平来说是必要的,而低输入电压的系统一般无需输入电阻器。
图 1 表明高达 34V 的电源电压可以直接作用于电源接线端和八个输入端,无需保护电阻器。在使用这种电源电压的情况下,内部线性稳压器可以提供稳定的 5V 输出,以为器件内部电路和外部隔离器或者微控制器供电。另一个辅助功能是片上温度传感器,其在结温达到 150oC 时便向控制器发出报警。
通过可调节输入电流限制,让在器件输入端直接使用高达 34V 的高压成为可能。就纯电阻输入的高压接口而言,由于输入电流增加带来输入电压上升,从而导致其功耗急剧上升。与之相比,由于将输入电流限制在某个恒定电平,而这一电平可以通过使用一个外部精密电阻器来进行调节,因此 DIS 的输入极大地降低了功耗。
另外,每条通道都对其输入信号进行强度和耐力检查。这种电流、电压检测功能具有一些内部信号阈值,用于确保通道不会被漏电流或者残留电压触发。
在导通状态(开关关闭)的情况下,电流比较器检测输入电流是否高于预定义的漏电流阈值,而电压比较器则检测输入电压是否高于内部设定的基准电压。如果两个比较器输出均为逻辑高电平,则可编程去抖动滤波器检查输入状态的新变化是否由噪声瞬态或者真输入信号所引起。
导通状态时,滤波器输出为高电平,同时电流限制器输出连接至信号返回输出(Rex)。每个 RE-输出均有一个发光二极管 (LED) 连接接地层,从而实现传感器开关状态的可视化指示。因此,如果某个开关关闭,则 LED 亮起。在断开状态(开关打开)下,滤波器输出为低电平,同时电流限制器的输出接地,则 LED 不亮。
输入配置
针对某种应用对数字输入串行器进行配置时,只有两个重要的参数,即输入电流限制 IIN-LIM 和导通阈值 VIN-ON。这两个参数均通过外部电阻器 RLIM以及 RIN0 到RIN7 来进行调节。尽管 RLIM 定义所有八条输入通道的电流限制,但也可以通过使用不同的 RIN 值,来单独设定每条通道的导通阈值。
电流限制器内部实现比较器功能,其阈值电流 ITH 与最大输入电流 IIN-LIM 完全相同。利用一个反射系数为 n = 72 的电流镜,通过基准电流 IREF 推导出 ITH。由于 IIN-LIM 与 ITH 相同,因此最大输入电流可以表示为:
方程式 1
IREF 反过来又由内部 1.25V 带隙基准与外部电阻器 RLIM 的比计算得到:
方程式 2
将方程式 2 插入到方程式 1 中,得到 IIN-LIM 为 RLIM 的函数:
方程式 3
求解方程式 3 得到 RLIM,即设置理想电流限制所需的电阻器值:
方程式 4
上一页12下一页
00现场输入导通阈值电压 VIN-ON,与电流限制、输入电阻器以及器件输入的导通阈值电压 VIP-ON 有关。VIP-ON 等于内部电压检测比较器的固定 5.2V 基准电压。因此,VIP-ON 可以表示为:
方程式 5
插入 VIP-ON 的数值,然后代入方程式 3 的 IIN-LIM 计算结果,得到:
方程式 6
然后求解 RIN,得到设置规定电流限制条件下理想导通阈值所要求的输入电阻器值:
方程式 7
因此,针对各种应用对 DIS 进行完全配置只需要两个方程式,即方程式 3 用于设置电流限制,而方程式 7 用于达到理想导通阈值电压。根据这两个方程式,表 1 列出了不同输入阈值电压和电流限制的各种电阻器组合情况。
表 1 各种输入配置
表 1 中的星号表示非常高的输入电压会超出最大器件电压 34V。这种情况下,IPx 和接地之间连接的 30V 齐纳二极管可防止器件输入毁坏。将开关阈值设定在输入电压范围的中间,即 VIN-ON = VIN-max/2,这时最大齐纳电流将等于输入电流限制,即 IZ-max = IIN-LIM,同时总输入电流将为电流限制的两倍。
若想节能,需将电流限制设定为 0.5mA。很明显,在这种低输入电流情况下,将指示器 LED 连接至 Rex 输出没有意义,因为其不会亮起。相反,我们应该将它们放置在 CMOS 输出可以很容易地实现 LED 驱动功能的控制器端。
串行接口
图 1 表明对于高达 24V 标称值、或者 34V 最大值的总线电源来说,数字输入串行器可以将总线电压调低到 5V,以为数字隔离器或者微控制器提供充足的电源。但是,在高压条件下,在DIS之前调低总线电源电压,会极大地降低总功效。在非隔离应用中,使用一个微型充电泵,并通过控制器电源为 DIS 提供备用电源,这样做更利于提高能效。但是,在隔离式应用中,要求一个隔离式 DC-DC 转换器来穿过隔离层提供控制器电源。
实施电气隔离的原因是,数字输入串行器一般用于检测远距离安装传感器和信号源的输出电压,例如:AC 整流器的输出,其接地电位明显不同于本地控制器接地。将各种接地电位相互连接会引起大量接地环路电流流动。使用数字隔离器可以防止出现这种情况。
如前所述,DIS 数字接口的控制很容易实施。系统控制器只需通过其通用输出端之一,向 DIS 的/LD 输入端发送一个短且低活跃度的负载脉冲,旨在将当前的现场输入状态锁存至 DIS 移位寄存器中。之后,它向 CLK 线路施加一个时钟信号,以串行方式移出寄存器内容。
如图 2 所示,DIS 的移位寄存器结构通过简单地将前面器件的串行输出 SOP 连接至后面器件的串行输入 SIP,实现以菊花链方式连接多个器件。这种方法允许进行高通道数目的紧凑型数字输入模块设计,同时其仅使用了一个串行接口。
一次读取多个 DIS 器件的内容时,较短的读取周期时间便为基本要求,而标准微控制器 SPI 接口的最大速度已经可以达到 10 MHz 或者 20 Mbps。但是,DIS 的串行接口可以支持高达 300 Mbps的数据速率,其甚至超出了一些高速隔离器的数据速率。因此,若想将读取周期时间缩短至绝对最小值,便要求极高的时钟频率,同时还必须消除隔离器的传播延迟。
正因如此,微控制器常常被现场可编程门阵列 (FPGA) 所取代,因为它不仅仅具有高时钟频率,而且还允许实现接收时钟输入(如图 2 蓝色线条所示)。然后,由 FPGA 发送的相同时钟信号,经过隔离器延迟,开始将寄存器内容移出 DIS,同时与 SOP 信号一起通过另一个隔离器通道获得反馈,从而保持接收时钟和数据之间的相位关系。
图 2 隔离 32-通道数字输入模块
结论
数字输入串行器是低功耗控制器与高 DC 电压接口连接的最通用解决方案。SN65HVS88x 系列数字输入串行器支持低压控制器和高压应用之间的接口设计,拥有各种各样的特性,例如:欠压检测、电流限制、去抖动滤波、散热保护、奇偶发生以及单 5V 电源等。
上一页12下一页
00
从控制器角度看感应电容触控系统设计
中心议题: 感应电容型触摸屏设计与应用挑战 从控制器角度看感应电容触控系统
摘要:自2007年iPhone®出现后,感应电容触摸屏的年销售额已增长了100倍,并且速度没有减慢的迹象。本文描述了把感应电容型触摸屏集成到一个设备中时须面对的很多设计和应用挑战,并重点强调了控制器信噪比的重要性。
简介
自2007年iPhone®出现后,感应电容触摸屏的应用范围就在不断扩大。尽管如此,真正把感应电容触摸屏集成到设备中仍存在着很大的挑战,尤其在液晶显示器(LCD)、外围器件产生干扰及嘈杂的环境中。有效的解决方案之一是使用高信噪比(SNR)的触摸屏控制器来对抗噪声。一个高信噪比控制器还会有其它优势,下面将会详细描述。
SNR定义为信号(有用的信息)和噪声(无用信号)的功率比。如果信号和噪声在相同的负载下测量,SNR可以通过计算幅度均方根(RMS)的平方获得。功率比的值(PS/PN)通常很大,通常用对数(dB)来描述。SNR可以表示为:
SNRdB = 10log10(PS/PN) = 10log10(RMSS/RMSN)² = 20log10(RMSS/RMSN)
高SNR意味着测到的信号强度比背景噪声高。
整体触控性能
主要由两个器件决定整体触控性能:触摸屏传感器和触摸屏控制器。触摸屏传感器种类繁多,它们的名称形象的说明了其形状和结构,例如三角形、菱形、雪花形、条形等等。例如,“菱形”是菱形的网格结构,而 “条形”是行列交叉的网格,像一个城市的街道。一些传感器类型使用一层ITO,而其它的则需要两层或三层,这决定于所需的系统性能和触摸屏控制器芯片。
通常要根据触摸屏控制器结构来决定触摸屏传感器样式和层结构(“堆叠”)以最大化SNR。例如,在单层互容带有交叉(搭桥)的菱形样式中,触摸屏表面到ITO的X层和Y层的距离是一样的,这降低了增益误差并使行和列的SNR很接近。尽管如此,仍需要增加一层屏蔽层防止传感器受到LCD噪声干扰。使用高SNR的触摸屏控制器可以降低触摸屏传感器的成本,放宽设计限制,使用更多的样式和层结构。正如下面将要讨论的一样,高SNR触摸屏控制器还可提供额外的好处,例如较容易找到触摸中心,降低了触摸屏对环境噪声的灵敏度,并允许使用手套或尖导电笔。
控制器架构
自容式和互容式是两种主要的电容触摸屏感应检测技术,自容式和互容式的特性简单归纳如下:
自容式
•今天仍在使用的早期技术。
•受限于“鬼点”(相对于真实触摸位置的错误触摸位置),通常为一点触摸或两点触摸。
•菱形样式最普遍。
•对LCD噪声抑制较差。
•简单,低成本控制器。
互容式
•正在攻占市场的新一代设计。
•真正的两点或多点触摸。
•较高的精度。
•传感器样式设计更加灵活,这有助于最大化SNR。
•较好的噪声抑制。
•更复杂,高成本控制器。
很多应用仅需要一个或两个触点,因此自容方案更有吸引力,尤其当用户界面的触摸位置可控以消除“鬼点”的时候。自容方案的典型SNR超过30dB,通常需要在LCD和传感器的触摸层底部之间增加屏蔽层,这会增加成本,降低显示亮度。
其它技术可被用到自容方案以进一步提高SNR。这包括(a)增加每通道的采样数;(b)增加传感器驱动电压,这增加了固定噪声(如来自LCD的噪声)下的信号幅度;(c)在不同频率采样以避免固定频率干扰,如避开60Hz(这被称为“频率抖动”)。尽管如此,该技术通常会降低帧率,增加功耗,这两样都是不希望的。
从以上讨论中可以很清楚地看出,为了最大化SNR并支持两点或多点的触摸,互容式是最有希望的感应检测技术。图1的系统框图归纳了互容式的实现方法,即把一个激励信号加在触摸屏传感器电容的一极,把另一极连接到触摸屏控制器的模拟前端(AFE),AFE的输出被转化成数字格式并在数字信号处理器 (DSP)中进行进一步处理。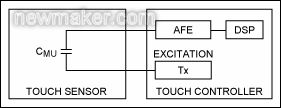
图1. 互容式系统框图
设计挑战
当把电容触摸屏传感器集成到触控设备中时会遇到很多技术挑战。下文所述情况均可受益于高SNR的触摸屏控制器。
传感器层设计:如今存在各种各样的触摸屏传感器层结构,分别对应材料、厚度、性能和成本的不同要求。如图2所示。而单层还是多层衬底,“向上”还是“向下”架构,X和Y层厚度的变化,透光胶(OCA)厚度的变化以及其它因素都会影响传感器产生的信号幅度。由于高SNR触摸屏控制器可以处理较宽动态范围的触摸屏传感器信号,结构差异引起的影响会被削弱。这就给了设计者更多的自由去选择传感器层结构。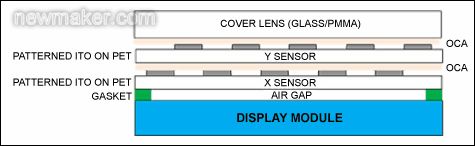
图2. 一种互容式触摸屏传感器的层结构(与实物不成比例)。
厚防护罩:一些应用,例如银行ATM机,可能需要一个厚玻璃罩来防止显示器被破坏。但厚玻璃罩会降低触摸信号强度,并降低触摸位置检测精度,这是因为手指离触摸屏传感器距离变大,导致电容范围变大,信号幅值变低,很难确定精确触摸位置,戴手套也会产生相同的效果。
LCD VCOM类型: LCD VCOM是“共模电压”,是LCD屏的参考电压。根据系统要求,可能采用AC VCOM或DC VCOM。AC VCOM是交变的,而DC VCOM是恒压。前一种方式会产生更多的噪声。
触摸屏传感器和保护透镜间的气隙:触控设备用户报告的最常见问题之一是保护透镜破损。为把产品做得更薄,电容型触摸屏传感器可以被压到保护透镜背面,但当替换一个破损的保护透镜时,触摸屏传感器也必须被替换,这会增加维修成本。为了避免这个成本,以及压合工艺低良率带来的成本,通常会用一个衬垫将触摸屏传感器和保护透镜隔开。
尽管如此,当触摸屏传感器和保护透镜间出现气隙时,触摸屏传感器会很难探测到手指触摸行为,因为空气介电常数低,手指触摸产生的信号的强度也低。解决这种问题的一个方法是提高触控系统灵敏度阈值,但这会很危险,因为传感器会接收到一些杂散信号,例如LCD或其它环境噪声,使得触摸屏传感器很难从噪声中区分出触摸动作。
工业设计要求:一些器件生产商把触摸屏传感器直接做在显示器上以使得整体设计更薄。但这也是有风险的,因为触摸屏传感器被直接放在噪声源上。一个解决方案是在触摸屏传感器和显示器之间增加一个屏蔽层。但多增加一层ITO会增加整体材料成本,而且对透光性有影响。
集成触摸屏传感器:为了降低生产成本,LCD生产商开始把触摸屏传感器直接做在偏光镜下面的彩色滤光片上。这种方法不需要外部传感器和压合,但触摸屏传感器更靠近显示器,进一步增加了传感器接收到的噪声。
触摸屏控制器位置:电容型触摸屏控制器通常位于触摸屏电缆上 (芯片在导线或PCB上),有时也会直接放在触摸屏传感器上(芯片在玻璃上)。但是为了测试方便,有些设计需要把触摸屏控制器放在系统板上。这可能需要很长的柔性电路板(FPC)来连接触摸屏传感器和控制器。长FPC会起到天线的作用,很容易吸收噪声,使得触摸屏控制器很难处理触摸屏传感器发出的弱信号。
其它噪声源:移动设备的主要噪声源是LCD屏、LCD逆变器、WiFi天线、GSM天线和设备中的各种高速电路。环境噪声也对触控系统有很大影响,如一些交流电源会产生很强的噪声,这些噪声会经由AC适配器传播。同样,当把设备放在台式荧光灯等强噪声源附近时,触控系统会把噪声误认为有效的触摸行为。
通常条件下,对正常大小的手指(>7mm)而言,高SNR的控制器不比低SNR的控制器有很大的优势,只有在在强噪声环境中,如使用书写笔或使用戴手套的手指输入,信号很弱的时候优势才会体现出来。低SNR控制器不能把信号从噪声中区分出来。如果降低传感器阈值以增加探测灵敏度,触控系统则会很容易被误触发,引起误操作,这在实际应用中是绝对不被允许的。
应用挑战
触摸精度:触摸精度是触摸屏传感器设计的一个重要指标。例如,在虚拟键盘应用中,字符被紧凑的排在一个很小的区域内,精确响应触摸动作,避免误输入字符很关键。提高精度的方法之一是在控制器中增加更多的传感器通道,支持更高的触摸屏传感器网格密度。但这将付出成本的代价,因为触摸屏传感器和触摸屏控制器都需要更多的引脚。此外,更多的传感器通道需要在触摸屏边界增加更多的走线,会增加边界宽度。
高SNR触摸屏控制器能够增强检测精度,因为它对弱信号的检测能力更强,并从较大的周边范围内收集采样数据,而较大的检测范围提供了更多的参考点,从而触摸位置可以被精确算出。图3揭示了触摸屏控制器SNR对划线精度的影响,这是一个机械臂握着一个4mm金属片所画的直线。高SNR控制器画出的直线显然比低SNR控制器画出的直线更平滑。注意这些测量结果都是由相同的触摸屏传感器和相同的后处理软件记录的,以保证公正的比较。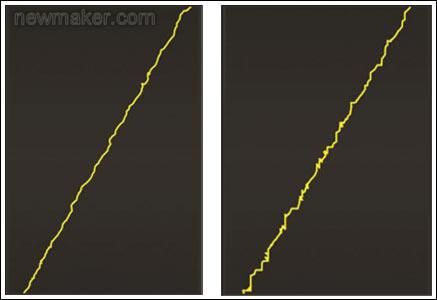
图3. 一个机器臂握着4mm金属片画的直线。左侧使用的是高SNR的触摸屏控制器;右侧使用的是低SNR触摸屏控制器
书写笔:电阻触摸屏用户长期以来已经习惯了使用带有尖的书写笔。典型电阻触摸屏书写笔笔尖直径小于1mm,通常用不导电的塑料制作。对于电容触控系统来说,检测这样一个细小、不导电的器件很困难,因为它能够给触摸屏控制器提供的信号非常微弱。市场上很多触控系统使用的书写笔笔尖直径很大(3-9mm),使得书写和绘画都变的很困难,因为笔尖粗会使得书写的痕迹很模糊。
只要书写笔用导电材料包裹(一个相对较小的牺牲),高SNR的触摸屏控制器可以检测到1mm直径笔尖的书写笔。图4说明了触摸屏控制器SNR对 2mm导电笔尖的书写笔检测结果的影响。低SNR的控制器很难从背景噪声中识别出小笔尖的书写笔,尤其在屏幕噪声最大的部分。在低SNR情况下使用1mm 笔尖的书写笔将导致有用信号淹没在背景噪声中,导致书写笔无法使用。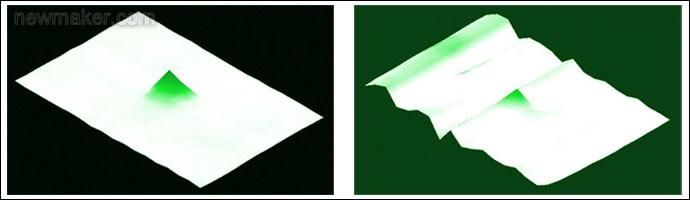 图4. 4英寸屏上使用2mm导电书写笔的电容值剖面图,左侧剖面使用高SNR触摸屏控制器;右侧使用低SNR触摸屏控制器。书写笔位于绿色锥体顶部;白色平面的高度代表了背景噪声。信噪比的增加有效降低了背景噪声幅度,如左图所示。如果右图中的书写笔移到屏幕的左边,信号将被噪声淹没,书写笔将无法工作。
图4. 4英寸屏上使用2mm导电书写笔的电容值剖面图,左侧剖面使用高SNR触摸屏控制器;右侧使用低SNR触摸屏控制器。书写笔位于绿色锥体顶部;白色平面的高度代表了背景噪声。信噪比的增加有效降低了背景噪声幅度,如左图所示。如果右图中的书写笔移到屏幕的左边,信号将被噪声淹没,书写笔将无法工作。
上一页123下一页
00非接触检测:接近检测逐渐在触摸屏应用中被采用。例如,通过增加触控系统的灵敏度,当使用电子书时,用户可以手势翻页,而不需要实际触碰屏幕。但触控系统增加灵敏度也很容易被环境噪声触发,设计者一直在努力寻找最佳平衡,既要最大化接近距离,又不至于引起误触发。三菱在这个领域做了一些有趣的研究,他们建了一个触控系统,基于触摸手指是悬空还是真实触摸来自动调节灵敏度。[2]
戴手套操作:在医学应用中,触摸屏需要能在带着外科手套的情况下工作。与之类似,车载触摸屏GPS需要能在冬天戴手套时使用,大多数手套是由介电材料做成的,这使得触摸屏传感器很难检测到触摸动作。增加触摸屏控制器的灵敏度可能在用户不带手套时引起误触发。唯一解决方法是需要应用(或用户)根据情况选择不同灵敏度。
结论
高SNR电容型触摸屏控制器带有很多优势,它可以满足如书写笔,小手指和手套等广泛的设计和应用要求。它可以帮助改善触摸精度而不需要专门的 ITO传感器样式或增加传感器通道。它可以满足各种显示器及不同背光灯的要求,同时保持很好的触摸性能,它为传感器设计和生产提供了更灵活的选择。使触控系统可以工作在强噪声环境中,并可减小设备本身来自LCD,WiFi天线,GPS天线和AC适配器的噪声。它给予设备OEM商更多的自由来选择元器件。最后,从性能的观点来看,它提供了精确的触摸精度。总之,高SNR触摸屏控制器能帮助终端用户实现更可靠的应用。
MPC5676R:飞思卡尔推出业界最强大的汽车动力总成系统微控制器
新闻事件: 飞思卡尔推出业界最强大的汽车动力总成系统微控制器
事件影响: 带来呈指数级提高的性能 为设计更环保、燃油效率更高的引擎提供支持
德国巴登(2011汽车电子系统展览会) – 汽车厂商继续通过新的汽车设计将业界标准提升至新高度,通过交付具有更高燃油经济性和更低排放的汽车满足消费者的期望和政府的法规要求。高性能微控制器 (MCU)在环保汽车设计领域扮演着重要角色,飞思卡尔半导体日前宣布推出强大的多核心汽车MCU系列中的第一款产品,帮助汽车设计者更加轻松地提高引擎 效率并降低排放污染。

飞思卡尔新推出的多核心Qorivva 32位MPC5676R MCU在Power Architecture® 技术的基础上构建,与上一代单核心MPC5566 MCU相比,性能提高了四倍、内存空间提高了一倍、并提供了更多功能。MPC5676R的多种优势允许全球汽车厂商在单一控制器中融合多种尖端技术,例如 直喷、涡轮增压和有线系统全驱动。
飞思卡尔负责汽车MCU业务副总裁Ray Cornyn表示,“飞思卡尔充分了解帮助汽车厂商生产更加环保、燃油效率更高的汽车所需的关键技术及其重要性,长期以来我们一直与汽车行业合作,共同开 发可以满足其最新一代设计需求的解决方案。在动力总成领域,我们的目标是生产最强大、最灵活的MCU,它可以同时管理最新引擎的所有复杂控制任务,为设计 者提供了降低系统复杂性所需的工具和软件平台。”
90纳米双核心MPC5676R MCU配备了:
* 6 MB片上闪存
* 384 KB片上RAM
* 三个高性能增强型时序处理器单元(eTPU)
* 64信道12位模拟到数字转换器
* CAN和FlexRay™ 通信系统
* 爆震检测处理片上硬件
该器件包括两个并行180 MHz 32位PowerArchitecture处理器,可实现最大吞吐量和软件灵活性。
MPC5676R的增强性能和特性满足了在汽车行业取得领先地位所需的竞争力。符合行业标准的Power Architecture核心使软件工程师可以更加轻松地重复使用传统代码,帮助汽车厂商降低成本,即便在升级到先进的多核心架构时也能如此。
MPC5676R的适应性和功能使其成为各种动力总成控制应用的理想器件,包括柴油、汽油和天然气引擎,以及混合动力电动和插入式电动汽车。飞思卡尔将继 续与包括通用汽车公司在内的全球汽车OEM厂商合作,共同提供32位MCU解决方案,可满足管理复杂的动力总成系统所需的性能要求。
Qorivva MCU的全面生态系统
Qorivva 微处理器的功能和价值远远超出了芯片范围以外。每个Qorivva MCU都具有一个完整的运行时软件解决方案,包括用于单核心和多核心MCU的AUTOSAR MCAL驱动程序套件和AUTOSAR实时操作系统。 另外,还有多种开发工具为Qorivva MCU提供支持,包括来自飞思卡尔开发合作伙伴的高性能编译器和多核心调试器。通过访问飞思卡尔生态系统和第三方工具,可帮助在原型机设计和软件集成过程 中降低应用开发复杂性和调试/验证时间。
另外,Qorivva动力总成系列产品目前由新的eTPU编译器、调试器和模拟器提供支持,帮助降低客户开发成本,并为其提供用于创建先进的引擎计时器软 件的工具。
飞思卡尔在汽车电子行业具有深厚的技术基础,并积极参与行业协会的各种活动。飞思卡尔是DSI、FlexRay和LIN协会的创始成员,AUTOSAR协 会的主要成员,以及PSI5、JASPAR和GENIVI协会的活跃成员。另外,飞思卡尔的全球系统实验室和软件定制服务也为其Power Architecture产品提供支持。
上市情况
飞思卡尔计划于2012年1月推出MPC5676R MCU的评估套件和样品。请联系您当地的飞思卡尔销售代表了解定价信息。
先进的动力总成控制白皮书
每一代新的动力总成控制系统都具有更高的复杂性,并需要更高的计算性能,为设计者带来很多挑战。作为汽车动力总成MCU的领先提供商,飞思卡尔在电子控制 领域努力前行,促进了汽车行业的发展,帮助克服了这些挑战。如需了解对高级控制架构的需求、以及飞思卡尔可满足目前和未来动力总成需求的多核解决方案的详 细信息,请阅读Challenges and Solutions in Advanced Powertrain Controls白皮书。
从控制器角度看感应电容触控系统的设计
中心议题: 感应电容型触摸屏设计与应用挑战 从控制器角度看感应电容触控系统
摘要:
自2007年iPhone®出现后,感应电容触摸屏的年销售额已增长了100倍,并且速度没有减慢的迹象。本文描述了把感应电容 型触摸屏集成到一个设备中时须面对的很多设计和应用挑战,并重点强调了控制器信噪比的重要性。
简介
自2007年iPhone®出现后,感应电容触摸屏的应用范围就在不断扩大。尽管如此,真正把感应电容触摸屏集成到设备中仍存在着很大的挑战,尤其在液晶 显示器(LCD)、外围器件产生干扰及嘈杂的环境中。有效的解决方案之一是使用高信噪比(SNR)的触摸屏控制器来对抗噪声。一个高信噪比控制器还会有其 它优势,下面将会详细描述。
SNR定义为信号(有用的信息)和噪声(无用信号)的功率比。如果信号和噪声在相同的负载下测量,SNR可以通过计算幅度均方根(RMS)的平方获得。功 率比的值(PS/PN)通常很大,通常用对数(dB)来描述。SNR可以表示为:
SNRdB = 10log10(PS/PN) = 10log10(RMSS/RMSN)² = 20log10(RMSS/RMSN)
高SNR意味着测到的信号强度比背景噪声高。
整体触控性能
主要由两个器件决定整体触控性能:触摸屏传感器和触摸屏控制器。触摸屏传感器种类繁多,它们的名称形象的说明了其形状和结构,例如三角形、菱形、雪花形、 条形等等。例如,“菱形”是菱形的网格结构,而 “条形”是行列交叉的网格,像一个城市的街道。一些传感器类型使用一层ITO,而其它的则需要两层或三层,这决定于所需的系统性能和触摸屏控制器芯片。
通常要根据触摸屏控制器结构来决定触摸屏传感器样式和层结构(“堆叠”)以最大化SNR。例如,在单层互容带有交叉(搭桥)的菱形样式中,触摸屏表面到 ITO的X层和Y层的距离是一样的,这降低了增益误差并使行和列的SNR很接近。尽管如此,仍需要增加一层屏蔽层防止传感器受到LCD噪声干扰。使用高 SNR的触摸屏控制器可以降低触摸屏传感器的成本,放宽设计限制,使用更多的样式和层结构。正如下面将要讨论的一样,高SNR触摸屏控制器还可提供额外的 好处,例如较容易找到触摸中心,降低了触摸屏对环境噪声的灵敏度,并允许使用手套或尖导电笔。
控制器架构
自容式和互容式是两种主要的电容触摸屏感应检测技术,自容式和互容式的特性简单归纳如下:
自容式
•今天仍在使用的早期技术。
•受限于“鬼点”(相对于真实触摸位置的错误触摸位置),通常为一点触摸或两点触摸。
•菱形样式最普遍。
•对LCD噪声抑制较差。
•简单,低成本控制器。
互容式
•正在攻占市场的新一代设计。
•真正的两点或多点触摸。
•较高的精度。
•传感器样式设计更加灵活,这有助于最大化SNR。
•较好的噪声抑制。
•更复杂,高成本控制器。
很多应用仅需要一个或两个触点,因此自容方案更有吸引力,尤其当用户界面的触摸位置可控以消除“鬼点”的时候。自容方案的典型SNR超过30dB,通常需 要在LCD和传感器的触摸层底部之间增加屏蔽层,这会增加成本,降低显示亮度。
其它技术可被用到自容方案以进一步提高SNR。这包括(a)增加每通道的采样数;(b)增加传感器驱动电压,这增加了固定噪声(如来自LCD的噪声)下的 信号幅度;(c)在不同频率采样以避免固定频率干扰,如避开60Hz(这被称为“频率抖动”)。尽管如此,该技术通常会降低帧率,增加功耗,这两样都是不 希望的。
从以上讨论中可以很清楚地看出,为了最大化SNR并支持两点或多点的触摸,互容式是最有希望的感应检测技术。图1的系统框图归纳了互容式的实现方法,即把 一个激励信号加在触摸屏传感器电容的一极,把另一极连接到触摸屏控制器的模拟前端(AFE),AFE的输出被转化成数字格式并在数字信号处理器 (DSP)中进行进一步处理。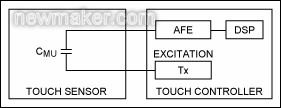
图1. 互容式系统框图
上一页123下一页
00
设计挑战
当把电容触摸屏传感器集成到触控设备中时会遇到很多技术挑战。下文所述情况均可受益于高SNR的触摸屏控制器。
传感器层设计:如今存在各种各样的触摸屏传感器层结构,分别对应材料、厚度、性能和成本的不同要求。如图2所示。而单层还是多层衬底,“向上”还是“向 下”架构,X和Y层厚度的变化,透光胶(OCA)厚度的变化以及其它因素都会影响传感器产生的信号幅度。由于高SNR触摸屏控制器可以处理较宽动态范围的 触摸屏传感器信号,结构差异引起的影响会被削弱。这就给了设计者更多的自由去选择传感器层结构。
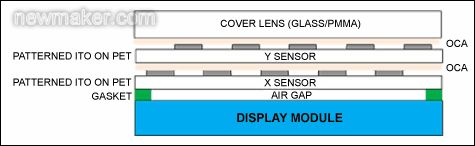
图2. 一种互容式触摸屏传感器的层结构(与实物不成比例)。
厚防护罩:一些应用,例如银行ATM机,可能需要一个厚玻璃罩来防止显示器被破坏。但厚玻璃罩会降低触摸信号强度,并降低触摸位置检测精度,这是因为手指 离触摸屏传感器距离变大,导致电容范围变大,信号幅值变低,很难确定精确触摸位置,戴手套也会产生相同的效果。
LCD VCOM类型: LCD VCOM是“共模电压”,是LCD屏的参考电压。根据系统要求,可能采用AC VCOM或DC VCOM。AC VCOM是交变的,而DC VCOM是恒压。前一种方式会产生更多的噪声。
触摸屏传感器和保护透镜间的气隙:触控设备用户报告的最常见问题之一是保护透镜破损。为把产品做得更薄,电容型触摸屏传感器可以被压到保护透镜背面,但当 替换一个破损的保护透镜时,触摸屏传感器也必须被替换,这会增加维修成本。为了避免这个成本,以及压合工艺低良率带来的成本,通常会用一个衬垫将触摸屏传 感器和保护透镜隔开。
尽管如此,当触摸屏传感器和保护透镜间出现气隙时,触摸屏传感器会很难探测到手指触摸行为,因为空气介电常数低,手指触摸产生的信号的强度也低。解决这种 问题的一个方法是提高触控系统灵敏度阈值,但这会很危险,因为传感器会接收到一些杂散信号,例如LCD或其它环境噪声,使得触摸屏传感器很难从噪声中区分 出触摸动作。
工业设计要求:一些器件生产商把触摸屏传感器直接做在显示器上以使得整体设计更薄。但这也是有风险的,因为触摸屏传感器被直接放在噪声源上。一个解决方案 是在触摸屏传感器和显示器之间增加一个屏蔽层。但多增加一层ITO会增加整体材料成本,而且对透光性有影响。
集成触摸屏传感器:为了降低生产成本,LCD生产商开始把触摸屏传感器直接做在偏光镜下面的彩色滤光片上。这种方法不需要外部传感器和压合,但触摸屏传感 器更靠近显示器,进一步增加了传感器接收到的噪声。
触摸屏控制器位置:电容型触摸屏控制器通常位于触摸屏电缆上 (芯片在导线或PCB上),有时也会直接放在触摸屏传感器上(芯片在玻璃上)。但是为了测试方便,有些设计需要把触摸屏控制器放在系统板上。这可能需要很 长的柔性电路板(FPC)来连接触摸屏传感器和控制器。长FPC会起到天线的作用,很容易吸收噪声,使得触摸屏控制器很难处理触摸屏传感器发出的弱信号。
其它噪声源:移动设备的主要噪声源是LCD屏、LCD逆变器、WiFi天线、GSM天线和设备中的各种高速电路。环境噪声也对触控系统有很大影响,如一些 交流电源会产生很强的噪声,这些噪声会经由AC适配器传播。同样,当把设备放在台式荧光灯等强噪声源附近时,触控系统会把噪声误认为有效的触摸行为。
通常条件下,对正常大小的手指(>7mm)而言,高SNR的控制器不比低SNR的控制器有很大的优势,只有在在强噪声环境中,如使用书写笔或使用戴 手套的手指输入,信号很弱的时候优势才会体现出来。低SNR控制器不能把信号从噪声中区分出来。如果降低传感器阈值以增加探测灵敏度,触控系统则会很容易 被误触发,引起误操作,这在实际应用中是绝对不被允许的。
应用挑战
触摸精度:触摸精度是触摸屏传感器设计的一个重要指标。例如,在虚拟键盘应用中,字符被紧凑的排在一个很小的区域内,精确响应触摸动作,避免误输入字符很 关键。提高精度的方法之一是在控制器中增加更多的传感器通道,支持更高的触摸屏传感器网格密度。但这将付出成本的代价,因为触摸屏传感器和触摸屏控制器都 需要更多的引脚。此外,更多的传感器通道需要在触摸屏边界增加更多的走线,会增加边界宽度。
高SNR触摸屏控制器能够增强检测精度,因为它对弱信号的检测能力更强,并从较大的周边范围内收集采样数据,而较大的检测范围提供了更多的参考点,从而触 摸位置可以被精确算出。图3揭示了触摸屏控制器SNR对划线精度的影响,这是一个机械臂握着一个4mm金属片所画的直线。高SNR控制器画出的直线显然比 低SNR控制器画出的直线更平滑。注意这些测量结果都是由相同的触摸屏传感器和相同的后处理软件记录的,以保证公正的比较。
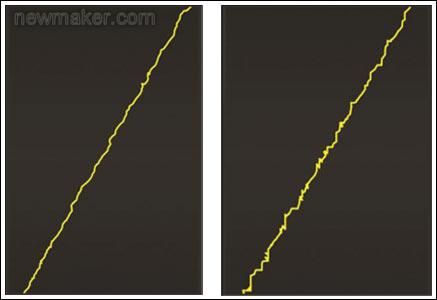
图3. 一个机器臂握着4mm金属片画的直线。左侧使用的是高SNR的触摸屏控制器;右侧使用的是低SNR触摸屏控制器
上一页123下一页
00
书写笔:电阻触摸屏用户长期以来已经习惯了使用带有尖的书写笔。典型电阻触摸屏书写笔笔尖直径小于1mm,通常用不导电的塑料制作。对于电容触控系统来 说,检测这样一个细小、不导电的器件很困难,因为它能够给触摸屏控制器提供的信号非常微弱。市场上很多触控系统使用的书写笔笔尖直径很大(3-9mm), 使得书写和绘画都变的很困难,因为笔尖粗会使得书写的痕迹很模糊。
只要书写笔用导电材料包裹(一个相对较小的牺牲),高SNR的触摸屏控制器可以检测到1mm直径笔尖的书写笔。图4说明了触摸屏控制器SNR对 2mm导电笔尖的书写笔检测结果的影响。低SNR的控制器很难从背景噪声中识别出小笔尖的书写笔,尤其在屏幕噪声最大的部分。在低SNR情况下使用1mm 笔尖的书写笔将导致有用信号淹没在背景噪声中,导致书写笔无法使用。
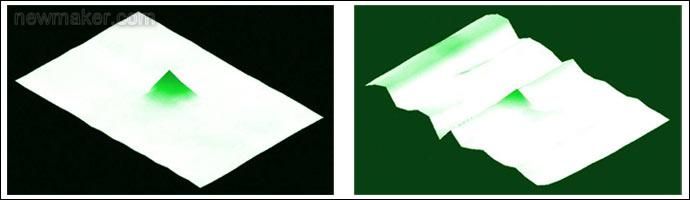
图4. 4英寸屏上使用2mm导电书写笔的电容值剖面图,左侧剖面使用高SNR触摸屏控制器;右侧使用低SNR触摸屏控制器。书写笔位于绿色锥体顶部;白色平面的 高度代表了背景噪声。信噪比的增加有效降低了背景噪声幅度,如左图所示。如果右图中的书写笔移到屏幕的左边,信号将被噪声淹没,书写笔将无法工作。
非接触检测:接近检测逐渐在触摸屏应用中被采用。例如,通过增加触控系统的灵敏度,当使用电子书时,用户可以手势翻页,而不需要实际触碰屏幕。但触控系统 增加灵敏度也很容易被环境噪声触发,设计者一直在努力寻找最佳平衡,既要最大化接近距离,又不至于引起误触发。三菱在这个领域做了一些有趣的研究,他们建 了一个触控系统,基于触摸手指是悬空还是真实触摸来自动调节灵敏度。[2]
戴手套操作:在医学应用中,触摸屏需要能在带着外科手套的情况下工作。与之类似,车载触摸屏GPS需要能在冬天戴手套时使用,大多数手套是由介电材料做成 的,这使得触摸屏传感器很难检测到触摸动作。增加触摸屏控制器的灵敏度可能在用户不带手套时引起误触发。唯一解决方法是需要应用(或用户)根据情况选择不 同灵敏度。
结论
高SNR电容型触摸屏控制器带有很多优势,它可以满足如书写笔,小手指和手套等广泛的设计和应用要求。它可以帮助改善触摸精度而不需要专门的 ITO传感器样式或增加传感器通道。它可以满足各种显示器及不同背光灯的要求,同时保持很好的触摸性能,它为传感器设计和生产提供了更灵活的选择。使触控系统可以工作在强噪声环境中,并可减小设备本身来自LCD,WiFi天线,GPS天线和AC适配器的噪声。它给予设备OEM商更多的自由来选择元器件。最后,从性能的观点来看,它提供了精确的触摸精度。总之,高SNR触摸屏控制器能帮助终端用户实现更可靠的应用。
基于物联网嵌入式技术的LED路灯控制器设计
中心议题:
目前,所使用的大功率LED 路灯大部分都是简单的直接照明,缺少必要的智能控制,或者有些虽然具备有智能控制的功能,但是却不能自动检测路灯的照明状况,也不能方便地对路灯进行远程及本地调控。 并且现有的照明管理系统大都采用有线电缆控制照明灯具,对LED 路灯进行调控,通信协议比较复杂,建设成本和运营成本都比较高。 本文将物联网嵌入式技术引入路灯控制器,实现LED 路灯的智能控制。
物联网,是指将各种信息传感设备,如射频识别( RFID) 装置、红外感应器、全球定位系统、激光扫描器等种种装置与互联网结合起来而形成的一个巨大网络,将沟通从任何时间任何地点任何人之间的沟通连接扩展到人与物( Human to Thing) 和物与物( Thing to Thing) 之间的沟通连接。 发展物联网的关键在于射频标签、传感器、嵌入式系统及传输数据计算等领域。 其中,嵌入式系统是以应用为中心,以计算机技术为基础,软硬件可裁剪,适用于应用系统对功能、可靠性、成本、体积、功耗有严格要求的专用计算机系统。 嵌入式系统是物联网的“大脑“和“中枢神经”,物联网内的所有个体都需要嵌入式系统来传输和处理处理信息,嵌入式系统的好坏将直接影响物联网的运做。
本文以路灯控制器为应用背景,设计了支持CDMA 及ISM 无线通信的智能路灯控制器,将物联网嵌入式技术应用其中,利用控制器提供的专用接口和CDMA 网络平台,实现与各类传感器的连接,实现“人—物”、“物—物”、“物—人”之间的信息交流。
1 路灯控制系统
本文设计的路灯控制系统由3 个控制层、2个通信层组成。 系统的结构如图1 所示。 操作人员通过监控软件或手机将需求数据发送到CDMA网络进而传送给路灯主控器; 路灯主控器对接收数据分析、处理,并通过自组ISM 无线网络将数据送给节点控制器; 节点控制器做出响应并发出返回数据,数据按原路径返回给操作人员。 本文设计了系统核心部分: 智能路灯控制器,包含了主控器及节点控制器的设计。
2 主控器设计
主控器包括: ATmega128 主控模块、CDMA 通信模块、ISM 通信模块、显示输入模块,结构图2所示。
在主控模块采用核心板设计,结构如图3 所示。
主控芯片采用AVR ATmega128 芯片。 ATmega128是高性能、低功耗的AVR8 位微处理器,它的运行速度快,大多数指令可以在一个时钟周期内完成; 寿命: 10, 000 次写/擦除周期; 具有独立锁定位、可选择的启动代码区; 通过片内的启动程序实现系统内编程; 真正的读- 修改- 写操作硬件乘法器只需两个时钟周期; 具有128K 字节的系统内可编程Flash; 4K 字节的内部SRAM; 可以对锁定位进行编程以实现软件加密; 具有JTAG 接口,方便程序在线调试、下载; 两个可编程的串行USART; 可工作于主机/从机模式的SPI 串行接口。
2. 2 CDMA 模块
CDMA 模块内部封装了完善的TCP /IP 等协议栈,可为远程无线传输提供透明的TCP /IP 通道,主要完成主控器与远程控制中心通信,完成指令数据的双向传输。 CDMA 模块与主控器通过UART1 双向传送数据。 本系统选用电信公司提供的CDMA 模块,通过MAX232 电平转换芯片和ATmega128 的UART1 口相连,实现全双工的数据通信。 模块采用5V 供电,ATmega128 的PD6 口经MAX232 电平转换芯片转换后接到模块的DTR.
DTR 信号用来通知CDMA 模块准备发送数据还是发送已经结束。
2. 3 ISM 通信模块
ISM 通信模块主要完成主控器与节点控制器通信,模块芯片及接口如图4 所示。
本文选用nRF24l01 作为ISM 通信模块无线收发芯片。 nRF24l01 芯片是工作在2. 4 ~ 2. 5GHz 世界通用ISM 频段的单片无线收发器芯片,无线收发器包括: 频率发生器、增强型SchockBurstTM 模式控制器、功率放大器、晶体振荡器、调制器解调器、输出功率、频道选择和协议的设置可以通过SPI 接口进行设置。 它具有内置链路层,自动应答及自动重发功能、地址及CRC 检验功能、数据传输率1 或2Mbps、SPI 接口数据速率0 ~ 8Mbps、125 个可选工作频道。 芯片具有极低的电流消耗,当工作在发射模式下发射功率为- 6dBm 时电流消耗为9. 0mA,接收模式时为12. 3mA.
2. 4 显示输入模块
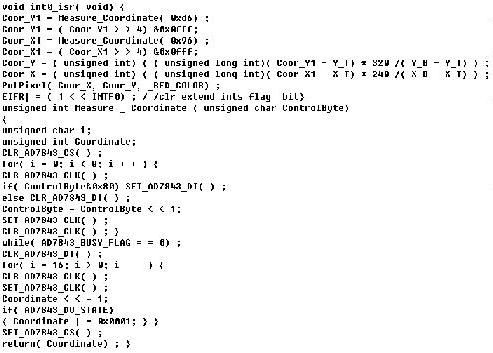
本文选择TFT034 触摸液晶模块用作显示及控制指令输入。 TFT034 采用四线电阻触摸屏作为输入,320x240 像素的8 位数据的256 彩色LCD屏作为显示输出。
320x240 像素的8 位数据的256 彩色LCD 屏,显示一屏所需的显示缓存为320 × 240 × 8bit,即76800 字节,在显示中每个字节,对应着屏上的一个像素点,因此,8 位256 彩色显示的显示缓存与LCD 屏上的像素点是字节对应的。 每个字节中又有RGB 格式的区分,既有332 位的RGB,又有233 的格式。 在彩色图象显示时,首先要给显示缓存区一个首地址,这个地址要在4 字节对齐的边界上,而且,需要在SDRAM 的4MB 字节控制之内。 它是通过配置相应的寄存器来实现的。 之后,接下来的76800 字节,就为显示缓存区,这里的数据会直接显示到LCD 屏上去。 屏上图像的变换是由于该显示缓存区数据的变换而产生的。 触摸液晶屏通过26脚排线与主控器相连,主控器IO 口数据可直接驱动触摸液晶屏模块。 四线触摸屏坐标获取通过AD7843 采集实现,程序代码如下:
节点控制器包括: MCU 控制模块、调光模块、无线通信模块,结构如图5 所示:
3. 1 MCU 控制模块
MCU 控制模块采用STC89C52 芯片。
STC89C52 是一种低功耗、高性能CMOS8 位微控制器,具有8K 在系统可编程Flash 存储器。 使用高密度非易失性存储器技术制造,与工业80C51产品指令和引脚完全兼容。 片上Flash 允许程序存储器在系统可编程,亦适于常规编程器。 在单芯片上,拥有灵巧的8 位CPU 和在线系统可编程Flash,因此满足节点控制芯片的要求。 模块结构如图6 所示。
调光模块实现感光与调光功能。 因为光敏电阻在黑暗环境里电阻值很高,当受到光照时,光敏电阻阻值下降,光照愈强,阻值愈低,入射光消失后,光敏电阻的阻值也就逐渐恢复原值。 因此采用光敏电阻作为感光传感器,由ADC0832 芯片将光敏电阻接收的光强模拟信号转换为数字信号输入到MCU 控制器中; MCU 控制器内部经过编程对输入的灯具工作参数进行分析判断,然后发出控制信号,控制恒流驱动电路输出电流的大小,从而控制LED 灯的亮度,进而达到智能调控LED 灯具的目的。
考虑到设计选用的为直流LED 路灯,参数为: 功率28 瓦; 电压AC100 - 280V; 功率因数> 0. 95 ; LED 颜色正白,暖白; 光通量2800 -12600LM; 色温3000—7000K ; 灯具效率90% ; 驱动电源恒流驱动45V 1. 5A 直流; 命50000 小时以上; 防护等级IP65 ; 工作温度- 35oC - 80oC ;工作湿度10% - 90%,因此需设计符合参数要求的直流调光电路。
直流调光方法常用的有: 调节正向电流的方法; 脉宽调制( PWM) 来调光。 调节正向电流的方法具有以下缺点: 调正向电流会使色谱偏移; 有时会出现使恒流源无法工作的问题; 长时间工作于低亮度有可能会使降压型恒流源效率降低温升增高而无法工作; 无法得到精确调光。 因而本文采用PWM 调光方法。
本文采用DN0112 芯片设计了PWM 调光模块。
DN0112 芯片是用于直流LED 灯的连续触摸IC 芯片,它通过输出PWM 可使灯光亮度在3% ~100%间无级调节,可使LED 路灯实现平滑的亮暗调节。 本文设计单片机P0. 3 输出调光控制信号,实现对DN0112 调光芯片的控制,使调光芯片可根据单片机输出的控制信号实现LED 灯开关、调光。
4、结论
本文设计了路灯主控制器及节点控制器,通过CDMA 通信实现了远程指令数据有效传输,通过自组无线传感网实现了主控制器与节点控制器指令数据的传输,给出了触摸液晶屏坐标点采集程序,通过对光强信号的采集设计了调光电路,完成了物联网的传感数据采集、嵌入式数据传输及处理,将物联网嵌入式技术引入到LED路灯控制器中。 实验证明,本文设计的路灯控制器能有效实现智能控制,取得了较好的节能、降耗效果。
中心议题:
- 基于物联网嵌入式技术的LED路灯控制器设计
- 学习主控器的设计
- 采用DN0112 芯片设计了PWM 调光模块
目前,所使用的大功率LED 路灯大部分都是简单的直接照明,缺少必要的智能控制,或者有些虽然具备有智能控制的功能,但是却不能自动检测路灯的照明状况,也不能方便地对路灯进行远程及本地调控。 并且现有的照明管理系统大都采用有线电缆控制照明灯具,对LED 路灯进行调控,通信协议比较复杂,建设成本和运营成本都比较高。 本文将物联网嵌入式技术引入路灯控制器,实现LED 路灯的智能控制。
物联网,是指将各种信息传感设备,如射频识别( RFID) 装置、红外感应器、全球定位系统、激光扫描器等种种装置与互联网结合起来而形成的一个巨大网络,将沟通从任何时间任何地点任何人之间的沟通连接扩展到人与物( Human to Thing) 和物与物( Thing to Thing) 之间的沟通连接。 发展物联网的关键在于射频标签、传感器、嵌入式系统及传输数据计算等领域。 其中,嵌入式系统是以应用为中心,以计算机技术为基础,软硬件可裁剪,适用于应用系统对功能、可靠性、成本、体积、功耗有严格要求的专用计算机系统。 嵌入式系统是物联网的“大脑“和“中枢神经”,物联网内的所有个体都需要嵌入式系统来传输和处理处理信息,嵌入式系统的好坏将直接影响物联网的运做。
本文以路灯控制器为应用背景,设计了支持CDMA 及ISM 无线通信的智能路灯控制器,将物联网嵌入式技术应用其中,利用控制器提供的专用接口和CDMA 网络平台,实现与各类传感器的连接,实现“人—物”、“物—物”、“物—人”之间的信息交流。
1 路灯控制系统
本文设计的路灯控制系统由3 个控制层、2个通信层组成。 系统的结构如图1 所示。 操作人员通过监控软件或手机将需求数据发送到CDMA网络进而传送给路灯主控器; 路灯主控器对接收数据分析、处理,并通过自组ISM 无线网络将数据送给节点控制器; 节点控制器做出响应并发出返回数据,数据按原路径返回给操作人员。 本文设计了系统核心部分: 智能路灯控制器,包含了主控器及节点控制器的设计。
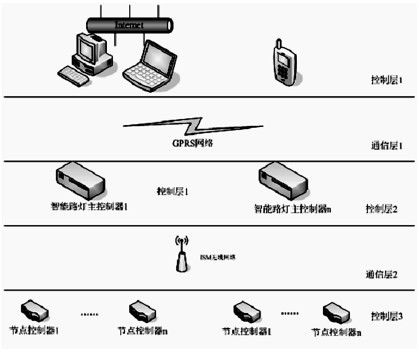
图1 路灯控制系统结构图
2 主控器设计
主控器包括: ATmega128 主控模块、CDMA 通信模块、ISM 通信模块、显示输入模块,结构图2所示。
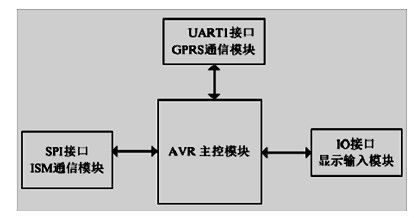
图2 主控器结构图
2. 1 主控模块在主控模块采用核心板设计,结构如图3 所示。
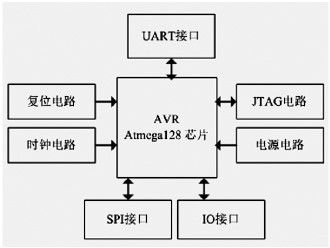
图3 主控模块结构图
主控芯片采用AVR ATmega128 芯片。 ATmega128是高性能、低功耗的AVR8 位微处理器,它的运行速度快,大多数指令可以在一个时钟周期内完成; 寿命: 10, 000 次写/擦除周期; 具有独立锁定位、可选择的启动代码区; 通过片内的启动程序实现系统内编程; 真正的读- 修改- 写操作硬件乘法器只需两个时钟周期; 具有128K 字节的系统内可编程Flash; 4K 字节的内部SRAM; 可以对锁定位进行编程以实现软件加密; 具有JTAG 接口,方便程序在线调试、下载; 两个可编程的串行USART; 可工作于主机/从机模式的SPI 串行接口。
2. 2 CDMA 模块
CDMA 模块内部封装了完善的TCP /IP 等协议栈,可为远程无线传输提供透明的TCP /IP 通道,主要完成主控器与远程控制中心通信,完成指令数据的双向传输。 CDMA 模块与主控器通过UART1 双向传送数据。 本系统选用电信公司提供的CDMA 模块,通过MAX232 电平转换芯片和ATmega128 的UART1 口相连,实现全双工的数据通信。 模块采用5V 供电,ATmega128 的PD6 口经MAX232 电平转换芯片转换后接到模块的DTR.
DTR 信号用来通知CDMA 模块准备发送数据还是发送已经结束。
2. 3 ISM 通信模块
ISM 通信模块主要完成主控器与节点控制器通信,模块芯片及接口如图4 所示。
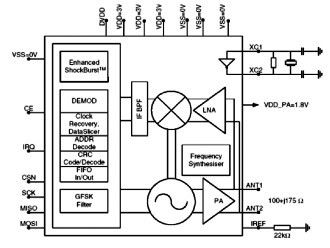
图4 ISM 模块芯片及接口设计
2. 4 显示输入模块
本文选择TFT034 触摸液晶模块用作显示及控制指令输入。 TFT034 采用四线电阻触摸屏作为输入,320x240 像素的8 位数据的256 彩色LCD屏作为显示输出。
320x240 像素的8 位数据的256 彩色LCD 屏,显示一屏所需的显示缓存为320 × 240 × 8bit,即76800 字节,在显示中每个字节,对应着屏上的一个像素点,因此,8 位256 彩色显示的显示缓存与LCD 屏上的像素点是字节对应的。 每个字节中又有RGB 格式的区分,既有332 位的RGB,又有233 的格式。 在彩色图象显示时,首先要给显示缓存区一个首地址,这个地址要在4 字节对齐的边界上,而且,需要在SDRAM 的4MB 字节控制之内。 它是通过配置相应的寄存器来实现的。 之后,接下来的76800 字节,就为显示缓存区,这里的数据会直接显示到LCD 屏上去。 屏上图像的变换是由于该显示缓存区数据的变换而产生的。 触摸液晶屏通过26脚排线与主控器相连,主控器IO 口数据可直接驱动触摸液晶屏模块。 四线触摸屏坐标获取通过AD7843 采集实现,程序代码如下:
节点控制器包括: MCU 控制模块、调光模块、无线通信模块,结构如图5 所示:
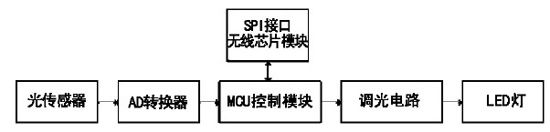
图5 节点控制器结构图
3. 1 MCU 控制模块
MCU 控制模块采用STC89C52 芯片。
STC89C52 是一种低功耗、高性能CMOS8 位微控制器,具有8K 在系统可编程Flash 存储器。 使用高密度非易失性存储器技术制造,与工业80C51产品指令和引脚完全兼容。 片上Flash 允许程序存储器在系统可编程,亦适于常规编程器。 在单芯片上,拥有灵巧的8 位CPU 和在线系统可编程Flash,因此满足节点控制芯片的要求。 模块结构如图6 所示。
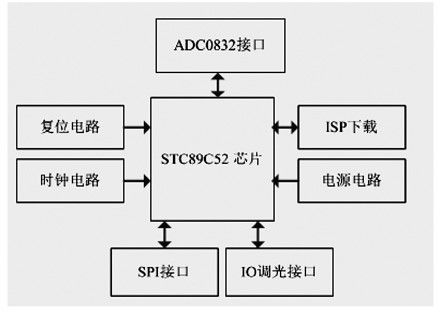
图6 MCU 控制模块结构图
3. 2 调光模块调光模块实现感光与调光功能。 因为光敏电阻在黑暗环境里电阻值很高,当受到光照时,光敏电阻阻值下降,光照愈强,阻值愈低,入射光消失后,光敏电阻的阻值也就逐渐恢复原值。 因此采用光敏电阻作为感光传感器,由ADC0832 芯片将光敏电阻接收的光强模拟信号转换为数字信号输入到MCU 控制器中; MCU 控制器内部经过编程对输入的灯具工作参数进行分析判断,然后发出控制信号,控制恒流驱动电路输出电流的大小,从而控制LED 灯的亮度,进而达到智能调控LED 灯具的目的。
考虑到设计选用的为直流LED 路灯,参数为: 功率28 瓦; 电压AC100 - 280V; 功率因数> 0. 95 ; LED 颜色正白,暖白; 光通量2800 -12600LM; 色温3000—7000K ; 灯具效率90% ; 驱动电源恒流驱动45V 1. 5A 直流; 命50000 小时以上; 防护等级IP65 ; 工作温度- 35oC - 80oC ;工作湿度10% - 90%,因此需设计符合参数要求的直流调光电路。
直流调光方法常用的有: 调节正向电流的方法; 脉宽调制( PWM) 来调光。 调节正向电流的方法具有以下缺点: 调正向电流会使色谱偏移; 有时会出现使恒流源无法工作的问题; 长时间工作于低亮度有可能会使降压型恒流源效率降低温升增高而无法工作; 无法得到精确调光。 因而本文采用PWM 调光方法。
本文采用DN0112 芯片设计了PWM 调光模块。
DN0112 芯片是用于直流LED 灯的连续触摸IC 芯片,它通过输出PWM 可使灯光亮度在3% ~100%间无级调节,可使LED 路灯实现平滑的亮暗调节。 本文设计单片机P0. 3 输出调光控制信号,实现对DN0112 调光芯片的控制,使调光芯片可根据单片机输出的控制信号实现LED 灯开关、调光。
4、结论
本文设计了路灯主控制器及节点控制器,通过CDMA 通信实现了远程指令数据有效传输,通过自组无线传感网实现了主控制器与节点控制器指令数据的传输,给出了触摸液晶屏坐标点采集程序,通过对光强信号的采集设计了调光电路,完成了物联网的传感数据采集、嵌入式数据传输及处理,将物联网嵌入式技术引入到LED路灯控制器中。 实验证明,本文设计的路灯控制器能有效实现智能控制,取得了较好的节能、降耗效果。
满足高性能和功效要求的单芯片CCM PFC及LLC组合控制器
中心议题:
- 电源设计的现有存在的问题
- 高性能CCM PFC及LLC组合控制器的优势
- 高性能CCM PFC及LLC组合控制器NCP1910的设计
计算机、服务器及平板电视向来是能效规范机构的重要目标,这些设备必须在满足高性能的同时符合最新能效要求。安森美半导体身为领先厂商,一直致力于推出符合最新能效规范的电源控制器。本文将介绍安森美半导体应用于计算机ATX电源及平板电视的高能效、高性能功率因数校正(PFC)及半桥谐振双电感加单电容(LLC)组合控制器NCP1910的主要特性及电源段的应用设计要点,帮助工程师更好地采用NCP1910进行相关的电源设计。
现有方案及存在的问题
用于上述电源设计的现有方案存在的最大问题是元器件数量太多,首先必须要有带主电源输入欠压(LBO)保护功能的PFC控制器,还要有带输入欠压(BO)保护及闩锁功能的LLC控制器;用于处理“功率良好”(PG)信号的比较器,以及用于感测的额外电路也必不可少。此外,为了实现次级端过压保护(OVP),需要可控硅整流器(SCR)、比较器及感测电路;为了提供LLC短路保护(SCP)并兼顾PFC工作异常状况,还需要其他一些元件。如果能在一个单芯片中结合所有功能,实现一种组合控制器就可以使这些问题迎刃而解。
高性能CCM PFC及LLC组合控制器的优势
安森美半导体推出的NCP1910在单芯片中结合了PFC和LLC控制器,集成了这两个转换器所需的全部信号交换(handshaking)功能,既可提高可靠性,又可支持更简单、更高密度的设计。NCP1910采用SOIC-24封装,适用于高功率的ATX、一体机(all-in-one)及服务器、平板电视电源。
图1是采用NCP1910的典型应用电路图共用电路,它包括远程PFC段、LLC段,以及实现导通/关闭、功率良好(PG)等的共用电路。
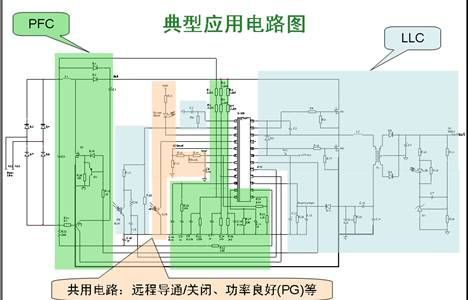
图1:采用NCP1910的典型应用电路图
PFC段具有以下一些特性:
•固定频率连续导电模式(CCM) PFC可提供65kHz,100 kHz、133 kHz及200 kHz选择;
•可编程过流阈值提供优化的感测电阻;
•过功率限制可根据平均输入电压限制电流;
•PFC异常保护,可以在出现PFC异常的情况下,器件停止工作,即使输入为高线路电压;
•欠压保护可避免反馈网络中出现错误连接的情况下受损;
•快速瞬态响应旨在维持Vbulk稳压:
--过压保护可自动恢复OVP阈值(稳压电平的105%);
--动态响应增强器可在Vbulk降至低于其稳压电平的95%时,使用其内部200 μA电流源来加快稳压环路速度;
•冗余OVP(OVP2)使用专用引脚来闩锁Vbulk OVP;
•可调节线路输入欠压带50 ms消隐时间(blank time),避免在低输入电压时受损;
•Vin2前馈可优化功率因数;
•Power Boost可在极端线路瞬态条件下调节Vbulk(如264 Vac→90 Vac);
•可调节频率反走提升轻载能效;
•软启动;
•图腾柱(Totem Pole)驱动能力为±1.0 A门驱动器。
LLC段具有以下一些特性:
•25 kHz至500 kHz的宽工作频率范围;
•板上固定死区时间为300 ns,可避免shot-through;
•在软启动或重启时,专用引脚将SS电容放电至地,从而提供平顺的输出电压上升;在LLC被CS/FF引脚(> 1V)或BO功能关闭时,SS引脚给CSS放电,并提供纯粹的软启动;
•高压驱动器门驱动器为+ 0.5 A -1.0 A;
•双故障保护电平位于CS/FF引脚:
--CS/FF > 1 V:LLC转换器立即通过将CSS接地来增加开关频率。这是一种自动恢复保护模式;
--CS/FF > 1.5 V:当故障严重并使CS/FF高于1.5 V时闩锁;
•可调节输入欠压(BO),FB 引脚电压占Vbulk的一部分,不需要高压感测轨,可以省电;
•NCP1910B有跳周期工作功能,当反馈脚电压低于0.4 V时,LLC驱动器进入跳周期模式,降低频率,提升轻载能效。
简便的设计方法
使用NCP1910进行设计过程非常简单,只要三步即可完成,如图2所示。第一步是设计PFC段,第二步是设计LLC段,第三步是设计信号交换部分。

图2 NCP1910 的设计过程
电路中的BO及PG电平是由R1、R2、R3决定的,无须感测高压。BO电平在Vbulk电平(如300 V,取决于电源系统的设计要求)时使LLC停止工作;PG电平在Vbulk电平时,器件通知次级端监控电路,产生功率故障(Power Fail)信号;在PFC频率反走输入功率级时,PFC开始降低工作频率。以下是PFC段和/或LLC段运用热关闭及过流、过压、欠压、过功率、输入欠压等保护特性,以及频率反走、跳周期等提升能效的技巧。
NCP1910的工作序列如图3所示,如果PFC未就绪,LLC就不能启动;一旦PFC就绪,就会开始一段20 ms的延迟;延迟结束后PGout引脚假定为低电平,LLC可以开始工作。在拨除交流输入关闭电源时Vbulk降低,到达PG信号时,PGout引脚被释放(开路);如果Vbulk到达LLC停止电平,LLC停止工作;或者如果Vbulk缓慢下降,如处在轻载状态,LLC会在PGout引脚被释放5 ms后停止工作。
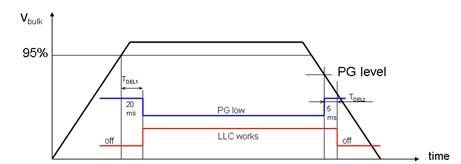
图3:NCP1910的工作序列
远程导通/关闭:以专用引脚接收由次级端监控芯片由光耦控制的导通/关闭(on/off)信号;在导通/关闭引脚被释放开路时,PFC及LLC均停止工作;在导通/关闭引脚接地时,PFC开始软启动→PFCok→20 ms后,LLC开始软启动。

图4:远程导通/关闭
热关闭(TSD):过热保护功能有助于实现良好的电源设计。当结点温度超过140℃时,该功能激活,驱动器变为低电平;结点温度降到典型值30℃时器件恢复工作。
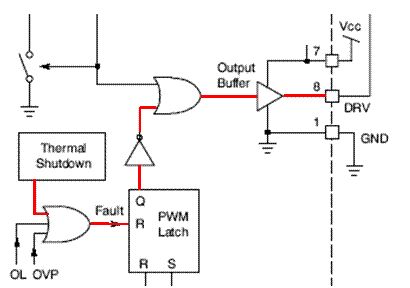
图5:热关闭
频率反走:可以提高轻载效率,设定Vfold以确定功率开始反走的Vfold值;当(VCTRL – VCTRL(min))小于Vfold时,频率开始反走;内部钳位限制反走的最大功率;启动时无反走。
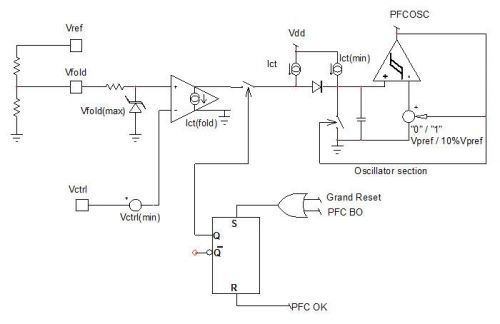
图6:频率反走
VCTRL与功率及频率的关系:当输出功率下降时,VCTRL随之下降;当到达反走设定点时,频率线性下降;65 kHz版本将最小频率内部设定为40 kHz。
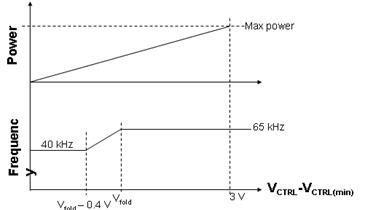
图7:VCTRL与功率及频率的关系
PFC段:
1. 线路输入欠压(BO)保护:线路输入欠压引脚接收部分平均输入电流,因此,感测到低线路电压时,50 ms定时器就会激活。这段消隐时间用于帮助符合维持要求。如果线路电压在50 ms消隐延迟结束时仍处于低电平,输入欠压保护就被触发,PFC驱动器关闭,VCTRL引脚接地,可使器件在故障消失时使用软启动。
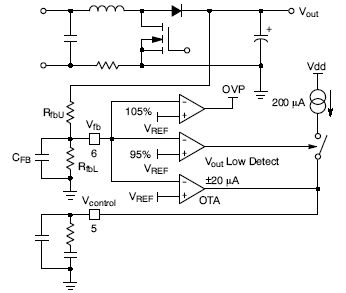
图8:线路输入欠压保护
2. 快速瞬态响应/过压保护(OVP):当VFB > 105% VPREF时,过压保护激活,驱动器输出变为低电平;当VFB低于103.2% VPREF时,器件自动恢复工作。
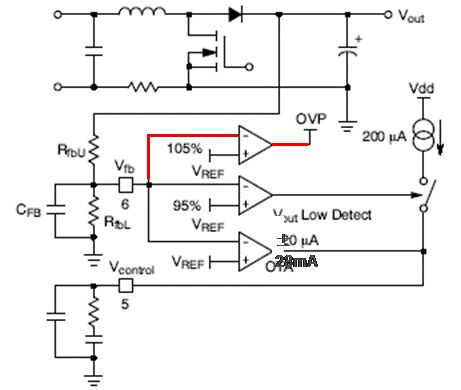
图9:PFC-快速瞬态响应/过压保护
3. 冗余OVP(闩锁):专用OVP2引脚用来保护大电容;电路中内置的20 μs滤波器用来提供更佳的噪声免疫性。当OVP2比较器被触发时,PFC及LLC均关闭。PFCok信号假定为低电平时,PGout被释放开路,使LLC停止工作。
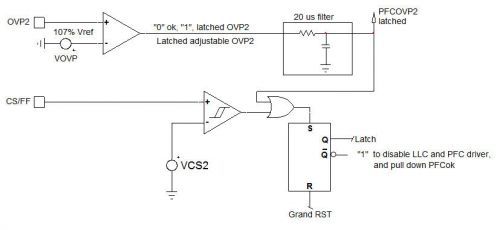
图10:PFC-冗余OVP
4. PFC异常检测:PFC异常检测的目的在于,如果PFC没有正常工作,那么即使出现高线路电压,PFC和LLC均应停止工作。例如,在高线路电压时PFC驱动器电阻损毁的情况。实现PFC异常检测保护的方法是:如果VCTRL保持在最高电平或低于最低电平,如VCTRL引脚异常短路,且时间长于1秒(tPFCabnormal),则PFCok内部信号下降,PGout引脚立即释放开路,通知系统电源将关闭;5 ms后LLC停止工作(tDEL2)。
5. 欠压保护(UVP)/反馈环路异常保护:UVP可以防止在反馈故障条件下启动。当VFB < 8% VPREF = 0.2 V时,UVP激活,器件关闭;当VFB高于12% VPREF = 0.3 V时,器件自动开始工作。
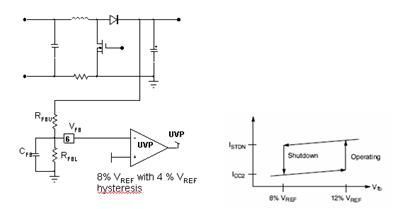
图11:PFC–欠压保护/反馈环路异常保护
6. Power Boost:PFC Power Boost功能的目的是在输入线路从高线路电压向低线路电压剧烈变化(如满载时从264 Vac剧降至90 Vac)时,限制输出功率,防止Vbulk将大幅下降,可能使Vout超出稳压范围。VLBO是Vac的平均值。
在下列情况时,VLBO可下拉至2 V(VLBO(PD)):VLBO高于2 V(高线路电压时),以及VCTRL处于最大值的时间长于4 ms(tPFCflag);Vbulk低于额定输出的95%时。PFC Power Boost功能在启动时被禁止;最长下拉持续时间的典型值为5 ms(tLBO(PDlimit));在后续最少70 ms时间(tLBO(PDblank))内,开关保持在开路状态。
LLC段:LLC拓扑结构为半桥双电感(LL)加单电容,其恒定占空比为50%,利用频率变化可以提升稳压效果。
1. 一个引脚用于Fmax、Fmin及FSS:Rmin决定LLC最小频率;Rmin // Rmax决定LLC最大频率;Rmin // RSS决定LLC启动频率;RSS和CSS决定软启动持续时间。Rt引脚控制LLC
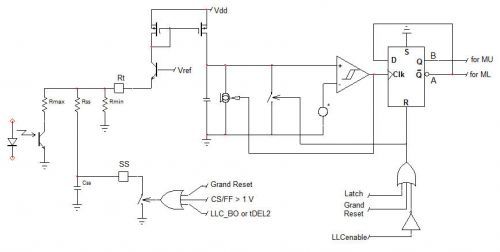
图12:LLC的控制
2. 完整软启动:SS引脚接地条件是:启动,或CS/FF高于VCS1(1 V),或BO激活,或tDEL2结束。仅在VSS低于VSS(RST)时,SS引脚上的开关被释放开路,执行从启动(重启)开始的完整软启动。
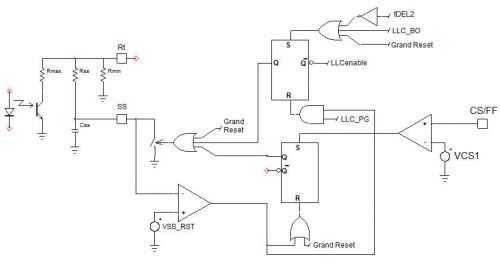
图13:完整软启动
3. 跳周期模式(仅B版本提供):跳周期模式在轻载时可削减LLC输出脉冲,从而避免任何频率失控(runaway),改善待机能耗。
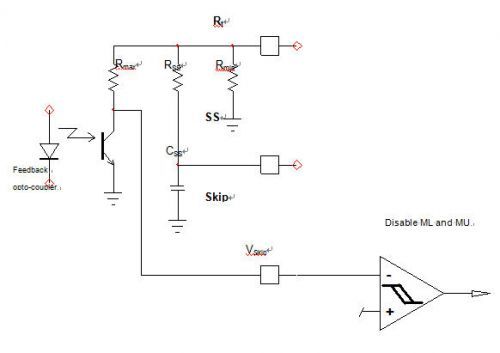
图14:跳周期模式
为了帮助设计,安森美半导体还提供演示电路板(原型板),其输入电压为90v-265v ac,输出为12 V/25 A,5 V/2 A(用于待机)。

图15:演示电路板
能效测试结果表明,该演示电路板的能效等级目标,如典型负载能效及功率因数、空载及待机输入能耗等如表1所示。

表1:能效等级目标
总结
安森美半导体的ATX电源新产品NCP1910高性能组合控制器在单颗IC中集成了功率因数校正(PFC)和主电源段控制器,具有PFC独立OVP、PFC动态响应增加器、PFC轻载频率反走、宽频率范围LLC、带高压驱动器及极佳OCP、远程导通/关闭控制及组合管理,可以为台式个人计算机、平板电视提供高能效、高性能的电源设计。
CC2560蓝牙模块|Ti CC256x Bluetooth® Smart Ready 控制器
CC2560蓝牙模块是德州仪器Ti CC256x Bluetooth® Smart Ready 控制器,是一款完整的BR/EDR/LEHCI 解决方案,此解决方案减轻了设计工作并可实现快速上市。 CC2560蓝牙模块基于 TI 的第七代内核,器件实现了已经证明的解决方案,此解决方案支持4.0 双模式 (BR/EDR/LE)协议。
CC2560蓝牙模块特性:
单片蓝牙 Smart Ready解决方案集成了基本速率 (BR) / 增强型数据速率 (EDR) / 低功耗 (LE)并且与蓝牙 4.0 技术规范(直到 HCI 层)兼容
BR/EDR 特性包括:
多达七个激活器件
分散网:同时具有 3 个微微网,1 个作为主控网和 2 个作为受控网
在同一个或者不同微微网上具有多达 2 个 同步面向 (SCO) 连接
支持所有语音编码-连续可变斜率增量调制 (CVSD),A 规则,μ 规则和透明传输(未编码)
LE 特性包括:
支持多达 6 个同步连接
紧密耦合在一起的多重呼吸示例以实现最小功耗
针对 LE 的独立缓冲可实现大量多重连接而又不会影响 BR/EDR 性能。
包括针对 BR/EDR 和 LE 的内置共存和优先级处理
针对简便堆栈集成和不同的微处理器内验证的灵活性,诸如Stellaris和MSP430
针对低成本设计进行了高度优化
单端50ΩRF 接口
封装尺寸:76 引脚,0.6mm 焊球间距,8.10mm x 7.83mm多行四方扁平无引线 (mrQFN) 封装
业界最佳的(RF) 性能(TX 电源,RX 灵敏度,阻断)
类 1.5" TX 功率高达 +12dBm
内部温度检测和补偿以确保温度范围内 RF 性能的最小变化,而无需外部校准
已改进的 AFH 算法,最大程度地缩短了采用时间
提供更长的范围,包括 2 倍于其它只支持 BLE 解决方案的范围
高级电源管理,可延长电池寿命,并易于设计:
片载电源管理,包括到电池的直接连接
针对激活、待机和扫描模式的低功耗
针对页面和查询扫的私有低功耗扫描使用其它解决方案
的关断和睡眠模式以大大减少功耗
物理接口:
H4 UART 上的标准 HCI,最大速率 4Mbps
完全可编程数字 PCM-I2S 编解码器接口
HCI工具:Windows PC 应用程序以评估器件的 RF 性能
PowerLite:完美照片,口袋充电器,控制器
颖特新原创编译,PowerLite能拍出创新、即时的照片,视频,自拍;它永远不会让你失望,当你最需要的时候,它能给你的智能手机充电。

它是口袋充电器,满足6小时的电量。无需额外的线缆,可用于iPhone和Android。

无线自拍神器,轻轻按键,便可轻松自拍。

降低红眼,更多曝光,拍出中性肤色。
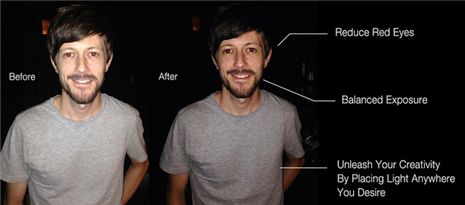
控制灯光,拍出更多细节。

超小型,更轻的重量。
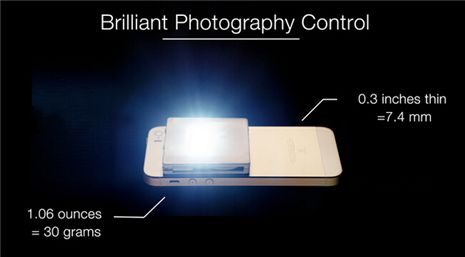
14个LED灯,相当于40W的灯泡,随心控制。

结构:电源按钮,自拍按钮,14个LED灯泡,充电线缆,电量指示灯。
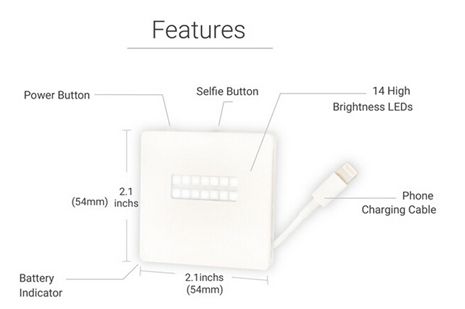
按下按钮找到你的手机。

目前该项目在Kickstarter众筹,有265位支持者,众筹到6,372澳币。
转载请注明作者和来源。
Flow:世界上最神奇的控制器
颖特新原创编译,Flow是一个适用电脑和其他设备的可编程无线控制器。

Flow,可以识别手势,触碰,精确触摸;无论是工作,游戏还是创作,都是每个人的完美伴侣。


目前已经开发并适用于30多种主流应用,包含操控苹果设备,youtube,spotify,PS,CAD等。

Flow适用于你的智能设备,如智能插座,灯泡,路由,开关,控制器,家居组合等。

对于设计师,Flow可以实现调整画笔粗细,软硬,复制图层,模糊处理,撤销,重做等功能。

对于社会学家,Flow可以让你在做演讲时翻到前一页,下一页PPT,开始演示,调整音量。

对于音乐爱好者,Flow可以随心播放,停止,下一首,前一首,音量,加入播放列表,喜欢等。

对于UX设计师,Flow可以操作图层前置后置,放大缩小,调整颜色,选择等。

无论在家使用,放在家里的墙上,放在口袋,和人见面聊天,还是工作中能用得上Flow。


目前该项目在Indiegogo众筹,有1,940位支持者,众筹到222,859 美金。
转载请注明作者和来源。